| Рис. 1. Состояние системы в фиксированные моменты времени / и 2 — кривые фазовых траекторий состояния | 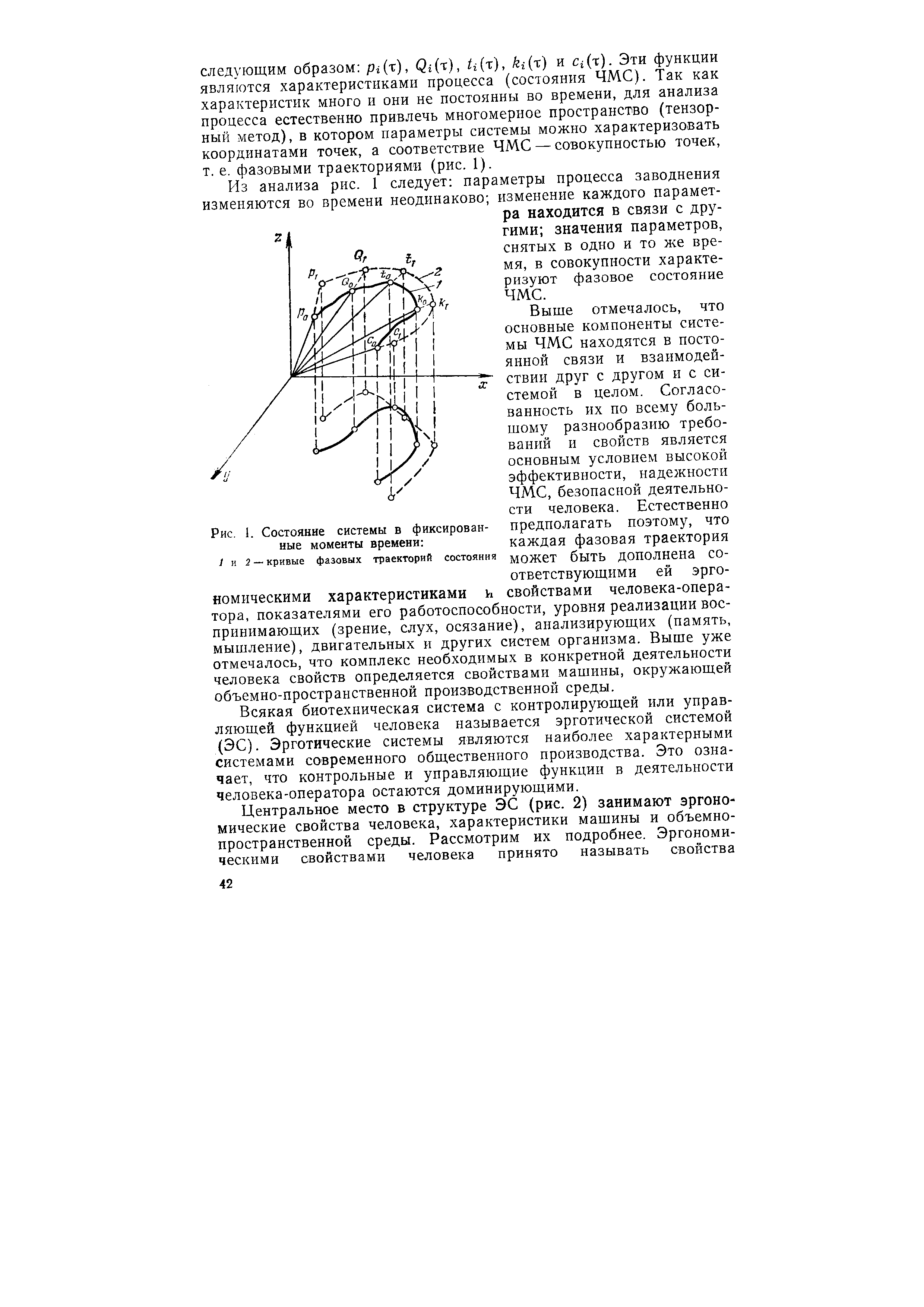 |
Ф в правых частях этих определений считается заданной достаточно гладкой функцией своих аргументов. Не претендуя на исчерпывающую полноту, ограничимся пока этими конструкциями. Их, а также гладких функций от функционалов перечисленных типов, достаточно для постановки большинства прикладных задач. В дальнейшем будут использоваться и другие конструкции функционалов. В формулах (12)—(16) фазовая траектория х ( ) связана с управлением краевой задачей (11) и однозначно определяется им. Этим оправдывается обозначение выражений в правых частях определений через F [и ( ) . Фактическое вычисление F [ ( ) требует решения краевой задачи (11), для чего используются соответствующие приближенные методы, ориентированные, как правило, на использование ЭВМ. Выбор того или иного численного алгоритма определяется содержательным характером краевой задачи (И). Особых трудностей при этом не возникает, так как задача оптимизации какого-либо объекта обычно ставится после того, как расчет его функционирования при каком-то фиксированном управлении уже достаточно освоен, и подходящие численные методы разработаны и проверены. [c.26]
Задача с ограничением в фазовом пространстве. Пусть на управление и ( ) наложено условие порождаемая им фазовая траектория х (t) обязана находиться в некоторой заданной области R фазового пространства [c.27]
Следствием этого является соответствующее малое возмущение фазовой траектории х (t) переходит sx(t)- - Ьх (t), причем 1 8ж( ) = = 0( 8ц(-) ) и Ъх(1) является решением уравнения в вариациях [c.30]
Рассмотрим сначала конструкцию (1). Пусть управление и ( ) получило малое возмущение и перешло в и ( ) - - 8ц ( ) следствием этого является малое возмущение фазовой траектории х (t) перешло в x(t)- -bx(t) и [c.34]
Теорема i. Если управление u(t) возмущено на множестве М малой меры р., то соответствующее возмущение фазовой траектории системы имеет оценку 8ж( ) = 0(ц) при всех t и удовлетворяет уравнению в вариациях [c.56]
Задачи для уравнений с запаздыванием [21]. Рассмотрим вариационную задачу, в которой управление определяет фазовую траекторию системы задачей Коши для уравнения с запаздыванием [c.72]
Здесь Ьх (t) — вариация фазовой траектории, являющаяся следствием вариации управления Ьи ( ) связь между ними дает уравнение в вариациях [c.80]
Типичным является существование предельной фазовой траектории х (t), причем сходимость оказывается равномерной существует (t) такая, что ) [c.82]
Для задач оптимального управления естественным является замыкание, порождаемое следующим определением сходящейся последовательности траекторий (и(1г ( ), х(1с) ( ) , где и ( ) — измеримая функция, а ж(й) ( ) — порожденная ею фазовая траектория. Такую последовательность называют сходящейся в себе, если при любом s > 0 для всех достаточно больших чисел , q > К (е) выполнены соотношения [c.84]
Следствием этого является существование предельной фазовой траектории х (t) и предельных значений всех входящих в постановку задачи функционалов. Таким образом, сходящейся последовательности траекторий управляемой системы соответствуют некоторая фазовая траектория х (t) (она почти всюду имеет производную и удовлетворяет краевым условиям задачи Г (х)=0) и значения функционалов F( (i=0, I,.. ., т). Рассмотренный выше пример показал, что мы можем столкнуться, по крайней мере, с тремя ситуациями [c.84]
Сказанное выше находится в некотором противоречии с теми примерами задач оптимального управления, которые будут в дальнейшем решены. В некоторых из них управления содержат особенности типа S-функции, а фазовые траектории х (t) оказываются разрывными. Не вдаваясь в подробности, рассмотрим причины, которые привели к таким странным решениям. [c.90]
Скользящие режимы и прикладные задачи. Выше был рассмотрен характерный пример вариационной задачи, в которой экстремум достигается на скользящем режиме. Речь идет о следующей ситуации строится оптимизирующая последовательность траекторий и рассматривается ее предел. Оказалось, что фазовые компоненты этой последовательности имеют в качестве предела достаточно гладкую функцию. Но соответствующие члены последовательности управлений (или, если угодно, производных фазовых траекторий) естественного предела не имеют. Аналогичные примеры строились и в классическом вариационном исчислении. Например, задача отыскания 1 [c.93]
Здесь мы рассмотрим вариационную задачу, отличающуюся от стандартной формой связи управления с фазовой траекторией. Подобные вариационные задачи возникают в связи с проектированием ядерных реакторов. Простейшая математическая модель [c.96]
Пусть имеется невозмущенное управление иг (s), uz (s) . Оно определяет область D, после чего может быть решена краевая задача (1) и найдены фазовая траектория х ( 1 2) и значение функционала F [и ( )] по формуле (4). [c.107]
Второе направление связано с построением минимизирующей последовательности траекторий, причем в качестве независимого аргумента берется не управление, а фазовая траектория (метод вариаций в фазовом пространстве). При таком подходе легко учитываются фазовые ограничения, однако возникают другие трудности. Этому направлению также уделено сравнительно небольшое место, так как имеются монографии [57], [86], посвященные, в основном, именно этому подходу. [c.109]
Выбор начального приближения. Модификация метода Ньютона не снимает проблемы подбора достаточно хорошего начального приближения, хотя и заметно ослабляет остроту этого вопроса. Опыт показал, что использование каких-либо содержательных соображений в целях нахождения хорошего начального приближения 1° крайне затруднительно даже в тех задачах, где подбор разумного приближения в терминах управляющей функции и (t) сравнительно прост. Пожалуй, единственным выходом является решение задачи каким-либо иным методом, достаточно надежно дающим относительно грубое приближенное решение. Такие приближенные методы в настоящее время разработаны, отличительной их чертой является то. что они дают хорошее приближение к искомому решению с точки зрения фазовой траектории х (t) и значений функционалов задачи Ff [и ( )], однако обычно довольно грубое с точки зрения управляющей функции и (t). Фигурирующий в принципе максимума вектор g тоже, как правило, получается с хорошей точностью. Создание приближенного метода решения задач оптимального управления, соединяющего надежность и эффективность с хорошей точностью по всем компонентам задачи возможно, видимо, лишь комбинированием методов грубого поиска минимума с последующим уточнением точного вида решения, основанным на использовании характеризующих его уравнений типа принципа максимума или уравнения Эйлера. [c.120]
Пусть (и ( ), х ( ) — некоторая невозмущенная траектория системы. Пусть управление возмущено малой функцией м(-), следствием чего явилось малое возмущение фазовой траектории х (t) -+x(t)+fa(t). [c.202]
При решении задачи обнаружилось досадное обстоятельство аппроксимация (6), казавшаяся совершенно естественной, привела к численному результату, не имеющему содержательного смысла. В данной задаче, поскольку ее решение хорошо известно, можно было предвидеть это и легко указать способ исправления формул разностной аппроксимации. В связи с этим возникают два вопроса как можно было бы в более сложной ситуации, когда решение нам неизвестно даже качественно, получив численное решение (10), догадаться о его ошибочности, и какие меры могли бы предупредить его появление Ответ на первый вопрос не совсем прост. Конечно, если бы мы располагали теоремой о непрерывности искомого решения х (t), сеточная функция (10), разумеется, вызвала бы подозрение о какой-то вычислительной ошибке. Однако в принципе появление разрывов в фазовой траектории х (t) (и, следовательно, особенности типа 8-функции в управлении и ( )) возможно мы встретимся с подобным явлением не только в искусственной модельной задаче 35, но и в имеющих содержательный смысл задачах 29,34. Поэтому решение типа (Ю) должно [c.226]
Модельная задача с фазовым ограничением и разрывом фазовой траектории [c.289]
Модель регулирования можно сформулировать в виде задачи оптимального управления в форме Лагранжа требуется найти оптимальную фазовую траекторию z(f) и управления x(f), обеспечивающие экстремум функционала [c.128]
В случае совпадения траекторий сигнала морского объекта и сигнала подсветки (0 = 0), что имеет место при разнесенном излучении, приеме сигналов и маневрировании объекта между излучателем и приемником, выражение для индекса фазовой модуляции и давления комбинационных волн может быть представлено в следующем виде 8 [c.90]
Пространственная и временная развертки производственной программы, преобразование агрегированных интегральных технике-экономических показателей в детализированные осуществляются в результате решения задачи календарного планирования. Таким образом, календарный план определяет в непрерывном фазовом пространстве дискретные точки программной траектории, последовательное прохождение которых обеспечивает переход производственного комплекса из некоторого начального состояния в конечное, параметры которого определены решением задачи текущего планирования. Календарный план позволяет с более высокой степенью достоверности учесть состояние производства и внешней среды. В то же время в ходе реализации календарного плана также могут возникнуть ситуации и состояния, которые достоверно оцениваются только на оперативных отрезках времени и которые, следовательно, не могли быть учтены на этапе составления календарного плана. Например, поступает оперативная информация о фактических показателях качества сырья и материалов, состоянии оборудования, реализации графиков снабжения и сбыта. В связи с этим, естественно, [c.11]
ТРАЕКТОРИЯ УПРАВЛЕНИЯ [ ontrol traje tory] в задачах динамического программирования — совокупность значений вектора управляющих параметров, выбираемых на каждом этапе (шаге, фазе) оптимизации. См. также Фазовая траектория, Фазовое пространство. [c.365]
ФАЗОВАЯ ТРАЕКТОРИЯ [phase traje tory] — см. Математическая теория оптимальных процессов, Траектория, Фазовое пространство. [c.374]
Пусть управление возмущено функцией su ( ), соответствующее вов-мущение фазовой траектории системы есть sy(t). Тогда [c.39]
Естественно возникает вопрос нельзя ли из последовательности траекторий (и( с) ( ), o (f ) ( ) выделить сходящуюся в том илияном смысле подпоследовательность, и предел последней и ( ),, ж ) считать решением вариационной задачи Ответ оказывается разным для и (t) и для фазовой траектории х (t). [c.82]
Этот факт устанавливается при весьма общих предположениях, выполняющихся в большинстве прикладных задач пусть для любого управления и (t) U, t [О, Т], определяемая краевой задачей фазовая траектория ограничена х (I) . С пусть при этом все возможные значения f (х, и) it т. е. dxjdt Сг. Множество таких функций x(k) ( ) удовлетворяет условиям известной теоремы Арцела (критерий компактности в С° [а, ]), и из любой бесконечной совокупности таких функций можно выделить равномерно сходящуюся подпоследовательность, причем предельная функция х (t) будет ограниченной, почти всюду дифференцируемой, и [c.82]
Теорема 1. Пуктъ на интервале [t1, t"] [О, Т] фазовая траектория х (t) управляемой системы x = f(x, и), Г (х) = 0 подчинена условию Ф[ж(г)] 0 при всех t [t, t"].. [c.182]
Доказательство. Пусть 8ttv+I/ (. ) — вариация, удовлетворяющая (9) и (10), uv+1 ( ) — ц (- )4- ц + / (. ), и ж 4"1 ( ) — соответствующая фазовая траектория. Пусть [c.183]
Если управление u(f), t0 / t2, переводящее систему из положения х(/о) в положение x(t0), является оптимальным, то в соответствии с принципом Л.С. Понтрягина1 фазовая траектория оптимального управления на отрезке ta t t2 должна соответствовать оптимальной кумуляте достижения цели ab . Так как уровни достижения локальных целей по содержанию и объему решаемых задач строго фиксированы (например, выражают сметную стоимость отдельных этапов работ возводимого сооружения), то существование на отрезке t0 t t2 некоторого управления v(t), переводящего систему из положения а в положение с по фазовой траектории аЬ2с, приводит к отклонению во времени момента свершения события Ъ (из Ъ в Ь2) на величину Д/. Но отклонение фазовой траектории управления системой от оптимальной кумуляты достижения цели означает, что управление v(t) не соответствует оптимальному. А несовпадение во времени моментов свершения события b свидетельствует о несогласованности на отрезке /0 = = h, т.е. указывает на несоответствие фактического производственного ритма оптимальному. [c.194]
Фазовые траектории листемы уравнений (8) Ц,( ),< ( ) с началом Vv(t ), u(ti) внутри параллелограмма, полученного пересечением прямых [c.146]
Смотреть страницы где упоминается термин Фазовая траектория
: [c.42] [c.53] [c.374] [c.493] [c.56] [c.62] [c.65] [c.123] [c.130] [c.151] [c.195] [c.264] [c.484] [c.28] [c.92]Смотреть главы в:
Популярный экономико-математический словарь -> Фазовая траектория
Популярный экономико-математический словарь (1973) -- [ c.19 ]