ПОИСК
Это наилучшее средство для поиска информации на сайте
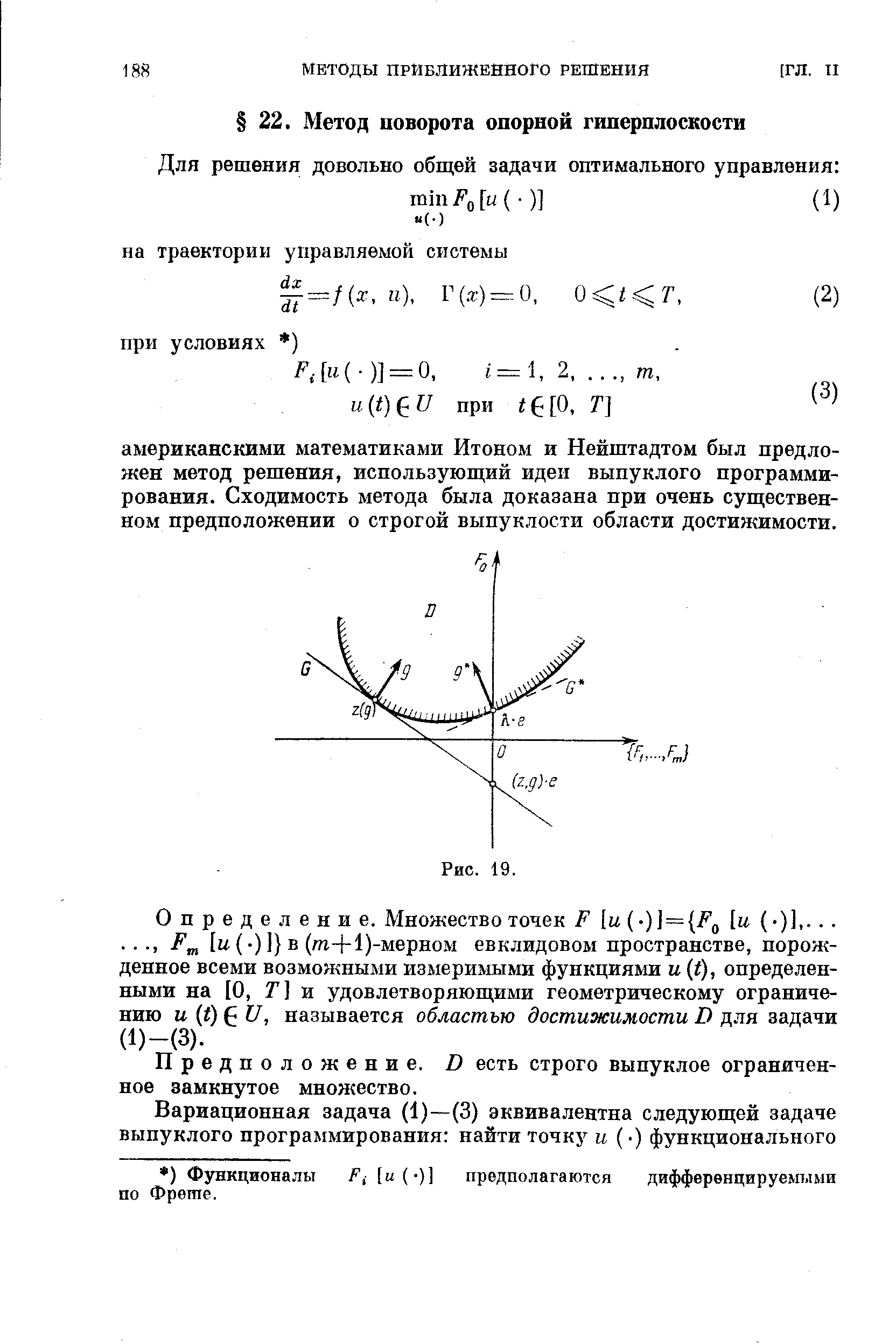
Метод поворота опорной гиперплоскости
из "Приближенное решение задач оптимального управления "
Предположение. D есть строго выпуклое ограниченное замкнутое множество. [c.188]Важным элементом метода является использование формулы dR/dg=z (g) (теорема 42.5). Это избавляет нас от необходимости вычислять Rg численным дифференцированием, которое потребовало бы m-кратного решения вариационной задачи с функционалом (5) и дало бы не очень надежный результат, так как R (g) вычисляется достаточно сложным итерационным процессом, и ошибки поиска, быть может, и не очень существенные с точки зрения величины R (g), резко возрастают при численном дифференцировании R. [c.190]
Она может быть решена алгоритмом параболической аппроксимации, используемым во многих расчетах, приведенных в настоящей книге. Из соответствующих таблиц в 26, 27 видно, что поиск s обходится, примерно, в 5—6 вычислений функции R (g) не надо, однако, забывать, что каждое такое вычисление — это решение простейшей вариационной задачи. [c.190]
Описанный выше метод высоко ценится у теоретиков, так как хорошо вписывается в сильно развитую теорию оптимизации выпуклых функций соответствующие теоремы обеспечивают его сходимость. Однако практическая ценность метода, видимо, невелика. Ниже мы изложим причины этого расхождения во взглядах. [c.190]
Найдя u (t) из (13) и вычислив функционалы F. по формулам (11), получаем точку z (g)= F0, Fv.. ., Fm [u ( )] . [c.191]
Задача состоит в нахождении и ( ), обеспечивающей попадание х (Т) в заданную точку X за кратчайшее время. [c.192]
Важную роль в дальнейшем играют следующие объекты D (t) — область достижимости за время t — это совокупность всех точек х, в которые траектория системы (14) может попасть под воздействием какого-то управления за время t t G (t)—dtD (t) — граница D (t) ). [c.192]
Будем здесь предполагать, что D (t) — строго выпуклая область (для широкого класса линейных задач эта строгая выпуклость довольно просто доказывается см., например, [12]). Из теории линейных задач известно, что решение П-системы (х (t), ф (f) обладает следующим свойством x(t) G(t), а ф (f) определяет опорную к G (f) в точке х (t) гиперплоскость если в этой точке поверхность G (t) дифференцируема, то ф (f) есть внешняя нормаль к ней. [c.193]
Кроме того, ф (t) ж х (f) — непрерывны. [c.193]
уравнением (16), а также процессом интегрирования П-системы устанавливается функциональная зависимость t (ф0). Если в момент = (ф0) будет x(Q=X, то задача решена. [c.193]
Учитывая сложный неявный характер определения зависимости t (ф ), мы можем, в общем случае, рассчитывать лишь на численные методы поиска максимума, для чего полезно уметь вычислять dt (ф0)/5ф0. Вычисление этой производной является хорошим упражнением, но нам она, в сущности, не понадобится. [c.193]
Доказательство предоставим читателю. [c.194]
Этим и заканчивается стандартный шаг процесса максимизации t ( j)0). Как уже говорилось, сходимость t - Т доказана одновременно с построением максимизирующей последовательности t u t t, . . - Т мы получаем и последовательность оптимальных (удовлетворяющих принципу максимума) траекторий, правые концы которых х (Z ), х ( ),.. . . - X, а сами траектории сходятся к искомой. Подчеркнем еще раз, что существенным фактором, определяющим успех этого метода, является строгая выпуклость множеств достижимости D (t). Поскольку для области D (t), выпуклой, но не строго, метод может не сходиться, следует ожидать медленной сходимости в тех ситуациях, когда граница G (t) в окрестности X имеет малую кривизну. [c.195]
Вернуться к основной статье