ПОИСК
Это наилучшее средство для поиска информации на сайте
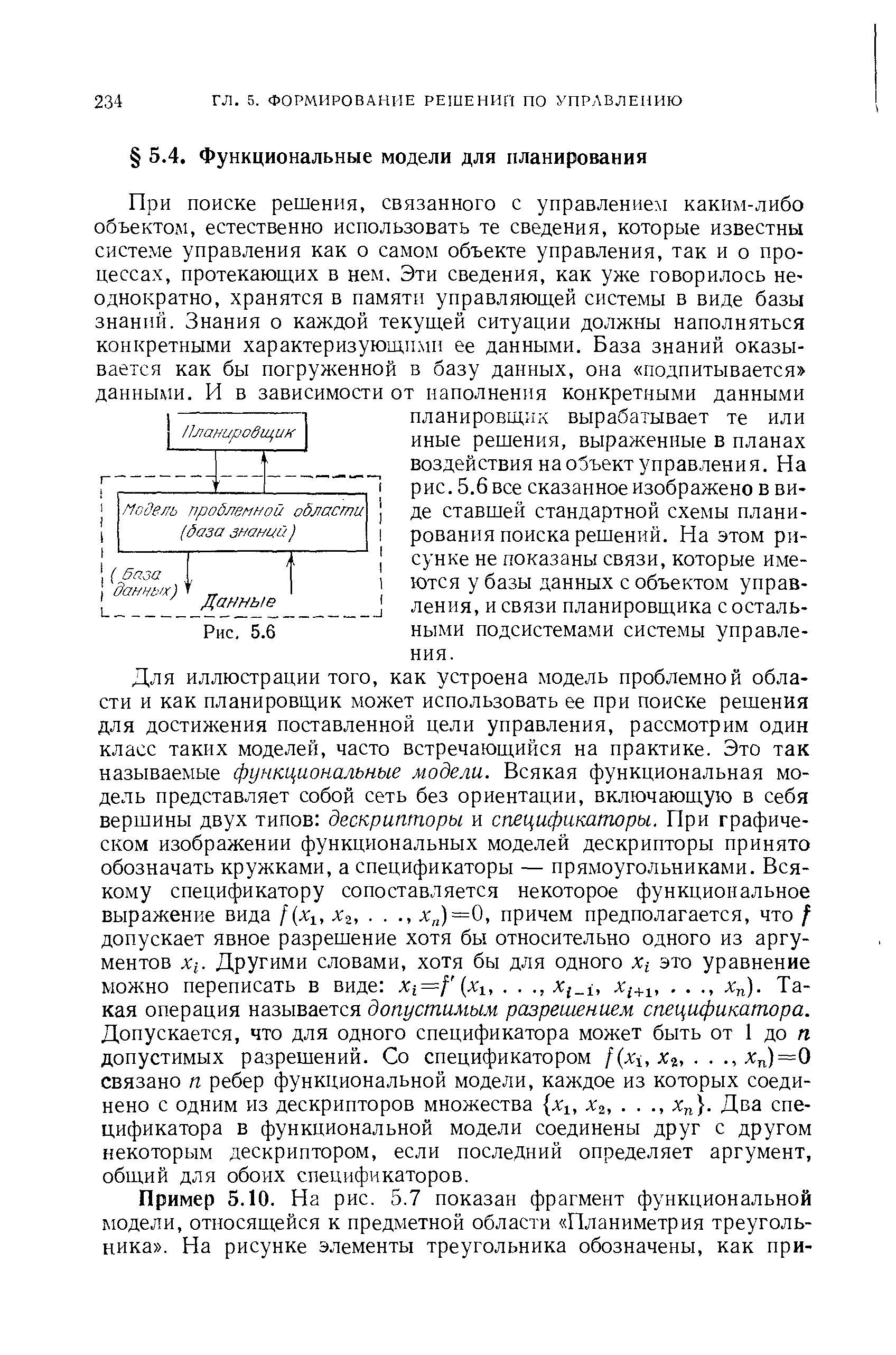
Функциональные модели для планирования
из "Ситуационное управление теория и практика "
Для иллюстрации того, как устроена модель проблемной области и как планировщик может использовать ее при поиске решения для достижения поставленной цели управления, рассмотрим один класс таких моделей, часто встречающийся на практике. Это так называемые функциональные модели. Всякая функциональная модель представляет собой сеть без ориентации, включающую в себя вершины двух типов дескрипторы и спецификаторы. При графическом изображении функциональных моделей дескрипторы принято обозначать кружками, а спецификаторы — прямоугольниками. Всякому спецификатору сопоставляется некоторое функциональное выражение вида f(xlt xz, . ., яя)=0, причем предполагается, что / допускает явное разрешение хотя бы относительно одного из аргументов Х[. Другими словами, хотя бы для одного xt это уравнение можно переписать в виде Xi=f (xi,. . ., x i, xi+i,. . ., xn). Такая операция называется допустимым разрешением спецификатора. Допускается, что для одного спецификатора может быть от 1 до п допустимых разрешений. Со спецификатором f(xi, хг,. . ., л )=0 связано п ребер функциональной модели, каждое из которых соединено с одним из дескрипторов множества хг, х2,. . ., хп . Два спецификатора в функциональной модели соединены друг с другом некоторым дескриптором, если последний определяет аргумент, общий для обоих спецификаторов. [c.234]Функциональные модели, подобные рассмотренной только что в примере 5.10, позволяют описать целый комплекс процедур, связанных с определением одних дескрипторов через другие. Для этого достаточно лишь задать исходное множество дескрипторов и целевые дескрипторы и найти с помощью планировщика такие допустимые разрешения для спецификаторов, которые образовали бы ориентированный путь, ведущий от исходных дескрипторов к целевым. Поиск такого пути (хотя бы одного из возможных) и есть основная задача планировщика. [c.235]
На первом шаге планировщик убеждается в том, что допустимое разрешение обеспечивает только спецификатор, помеченный на рисунке цифрой 1. Разрешение для него дает возможность найти значение дескриптора р, если известны значения a, b и с. Далее оказывается возможным разрешение спецификатора, отмеченного цифрой 2, что позволяет определить значение дескриптора г. Наконец, на третьем шаге планирования разрешается спецификатор, отмеченный цифрой 3, что приводит к определению значения дескриптора s. Так как дескриптор s является целевым, то планировщик заканчивает свою работу. [c.236]
После нахождения ориентированного пути, ведущего от исходных дескрипторов к целевым, необходимо сформировать программу вычислений. Это возможно, если в памяти управляющей системы имеется заранее заготовленный набор стандартных программных модулей, каждый из которых соответствует тому или иному допустимому разрешению определенного спецификатора. При наличии набора таких модулей найденный планировщиком путь указывает последовательность выполнения модулей друг за другом. [c.236]
Для того чтобы исключить подобные случаи в модели проблемной области заранее предусматриваются закономерности, выполнение которых должно быть обязательным при работе с конкретными данными. В нашем случае в модели проблемной области должны храниться такие закономерности, Сумма длин двух сторон треугольника всегда больше длины третьей стороны , Разность длин двух сторон треугольника всегда меньше длины третьей стороны , Сумма углов треугольника всегда равна 180° и т. п. Эти предварительные проверки должны выявить все случаи недопустимости исполнения программ при таких фиксированных исходных данных, которые нарушают основные закономерности проблемной области. [c.237]
В реальных задачах часто встречается случаи, когда переходы между состояниями в пространстве состояний или между подзадачами в пространстве подзадач недетерминированы, что отражает неполноту наших знаний о возможностях таких переходов. В этом случае дуги сети, на которой производится планирование, взвешиваются, например, значениями функции принадлежности. Общая оценка найденного плана вычисляется по оценкам этих значений на отдельных дугах разными способами. В частности, общая оценка может совпадать с минимальной оценкой, встречающейся на данном пути, или быть средней арифметической этих оценок. [c.238]
Вернуться к основной статье