В целях механизации и ускорения ведения спуско-подъемных операций современные буровые установки оснащаются пневматическими ключами (АКБ), клиньями (ПКР), а также комплексом механизмов (АСП). [c.85]
В качестве примера на рис. 8.1 изображена номограмма по определению себестоимости станочных приспособлений в зависимости от группы их сложности и числа оригинальных деталей в них. При этом приспособления разбиваются на пять групп сложности (/—V) к / группе относятся простые центровые оправки, державки, накладные кондукторы, призмы ко// — плиты с зажимными деталями, сварные и клепаные кондукторы для простых деталей, простые патроны, зажимные оправки, приспособления для фрезерования планок, клиньев к /// — кондукторы для сложных деталей, поворотные столы простой конструкции, простые делительные приспособления к IV — расточные приспособления для корпусных деталей, многошпиндельные головки, сложные приспособления и кондукторы к V — специальные приспособления, делительные приспособления и поворотные столы. [c.153]
I группа. Механизмы, осуществляющие перемещение, регулирование скорости, остановку колонны бурильных труб и незагруженного элеватора, а также захват и удержание колонны труб на весу буровая лебедка с коробкой скоростей и приводными агрегатами, снабженная главным (ленточным) и вспомогательным (гидравлическим или электрическим) тормозными устройствами талевая система с автоматическим элеватором пневматические клинья, встроенные в ротор. [c.11]
Клинья, встроенные в ротор (ПКР), управляются с поста бурильщика педалью. Однако при исследованиях целесообразно фиксировать не положение педали, а крайние положения собственно клиньев, так как команда на их подъем не реализуется до тех пор, пока вес колонны ие передан талевой системе. [c.18]
Учитывая, что функции ПКР характеризуются строгим взаимодействием с автоматическим элеватором, при исследованиях целесообразно фиксировать не только положение клиньев, но и момент времени, когда автоматический элеватор воспринимает полный вес бурильной колонны. [c.18]
Датчики с релейной характеристикой, выполненные на базе стандартных конечных выключателей, использовались для регистрации крайних положений рукоятки крана ШПМ, клиньев, блока ключа. В качестве датчика наличия нагрузки на автоматическом элеваторе использовался электроконтактный манометр ЭКМ-10, установленный в линии гидравлического индикатора веса. [c.19]
Клинья, встроенные ё ротор t/JKP) Рис. 4. Схема системы автоматической регистрации режимов управления СПО (вариант для электропривода) [c.20]
Тахограмма подъема загруженного элеватора, как правило, имеет вид трапеции. Причем на участке разгона скорость имеет значительные колебания, что связано с подхватом элеватором колонны труб, удерживаемой клиньями. Для участка замедления характерно нелинейное снижение скорости. Следствием нерационального управления остановкой загруженного элеватора является перебег нижнего замка свечи выше зоны ключа АКБ. Поэтому вынужденный припуск загруженного элеватора следует рассматривать как неотъемлемую часть подпроцесса подъема загруженного [c.26]
При наличии АСП форма тахограммы несколько меняется в конце участка замедления резко снижается скорость, что вызвано подхватом автоматическим элеватором колонны бурильных труб, удерживаемых клиньями. [c.29]
I участок. Целью управления на этом участке является разгон элеватора и подхват колонны труб, удерживаемой клиньями. [c.33]
Автоматический элеватор позволяет снимать колонну с клиньев без остановки процесса вследствие совмещения во времени процессов подъема элеватора и свинчивания замкового соединения колонна не может быть снята с клиньев до тех пор, пока свеча не будет навинчена, а ключ не станет в нерабочее положение. [c.81]
При оценке продолжительности процесса следует иметь в виду, что подъем элеватора на длину свечи заканчивается в момент подхвата колонны. Дальше следует другая операция — снятие колонны с клиньев. Результаты отмеченных операций тесно связаны между собой. Это объясняется тем, что в обоих случаях имеется общий управляемый параметр — скорость подхвата колонны ип. Таким образом, при оценке продолжительности подъема элеватора необходимо учитывать суммарные затраты времени [c.82]
| Рис. 40. Зависимость времени подъема незагруженного элеватора ta и времени снятия колонны с клиньев t K от скорости подхвата оа | 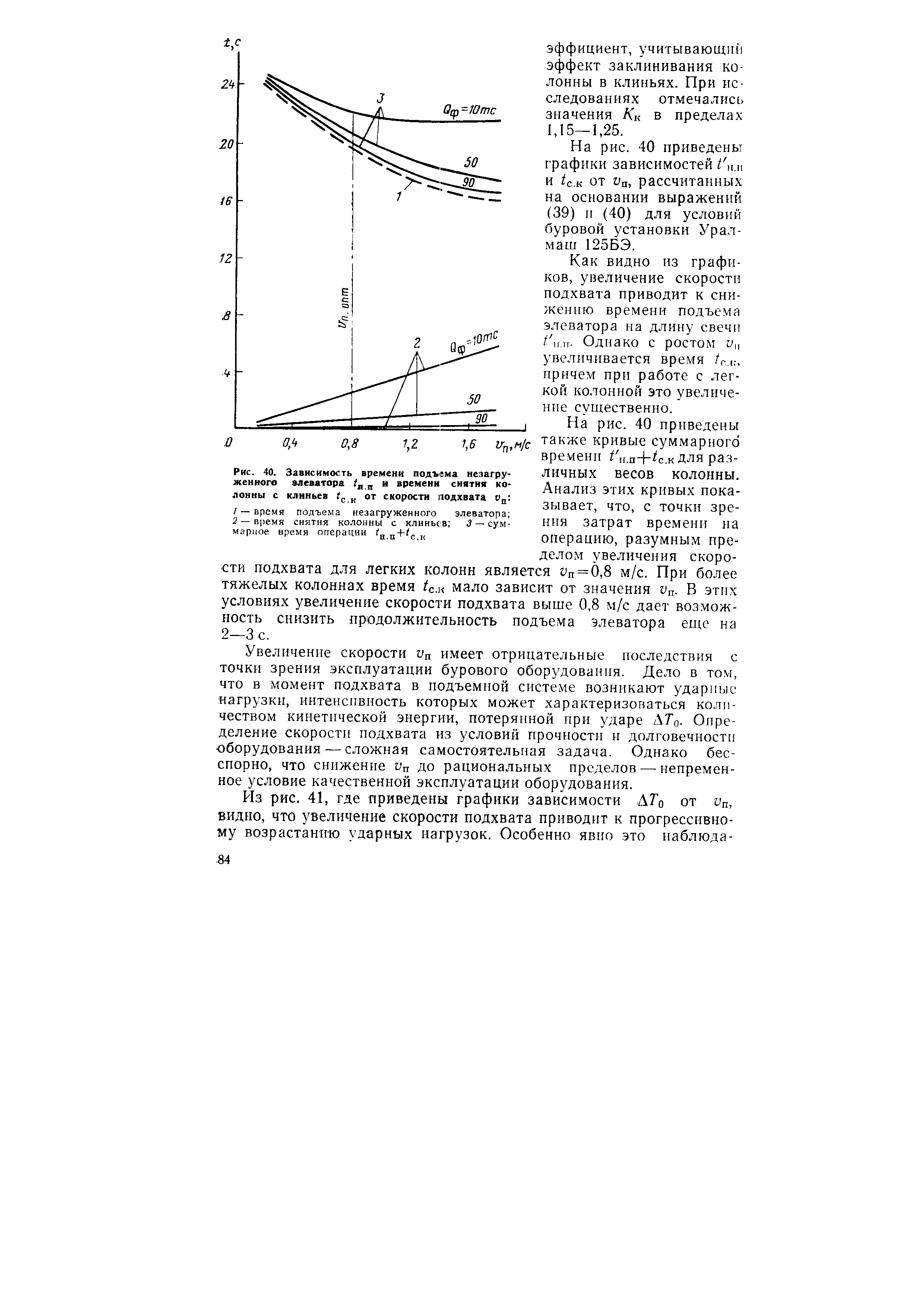 |
Методика расчета рационального режима взаимодействия органов управления лебедкой при снятии колонны с клиньев [c.86]
Рассматриваемый режим имеет очень низкую устойчивость к ошибкам управления, что требует точного отключения двигателей в сочетании с точной дозировкой тормозного момента. Так, при заданных уп = 0,8 м/с и а 3. .п = 0,18 м/с2 допустимые пределы колебания замедления 0,17—0,19 м/с2 (точки с и d ), допустимые пределы колебания 5 д 8,5—11 м, допустимые пределы колебания длины свечи от —1 м до +1,5 м. На практике сочетание ошибок управления и отклонений внешних условий при использовании VI скорости подъема приводят, как правило, к нерациональным режимам снятия колонны с клиньев. [c.90]
Для расчета рационального режима отключения ШПМ в первую очередь следует определить значения скоростей подхвата, необходимых для снятия колонны с клиньев [ип] = p(Q). [c.91]
I режим (рис. 45, а). Вес колонны до 35 тс. Скорость снятия колонны с клиньев 0,8 м/с обеспечивается только за счет маховых масс барабанного вала лебедки, т. е. с полностью отключенной ШПМ [в формуле (43) /=/б. ]. [c.91]
| Рис. 44. Графики скоростей подхвата, необходимых для снятия колонны с клиньев | 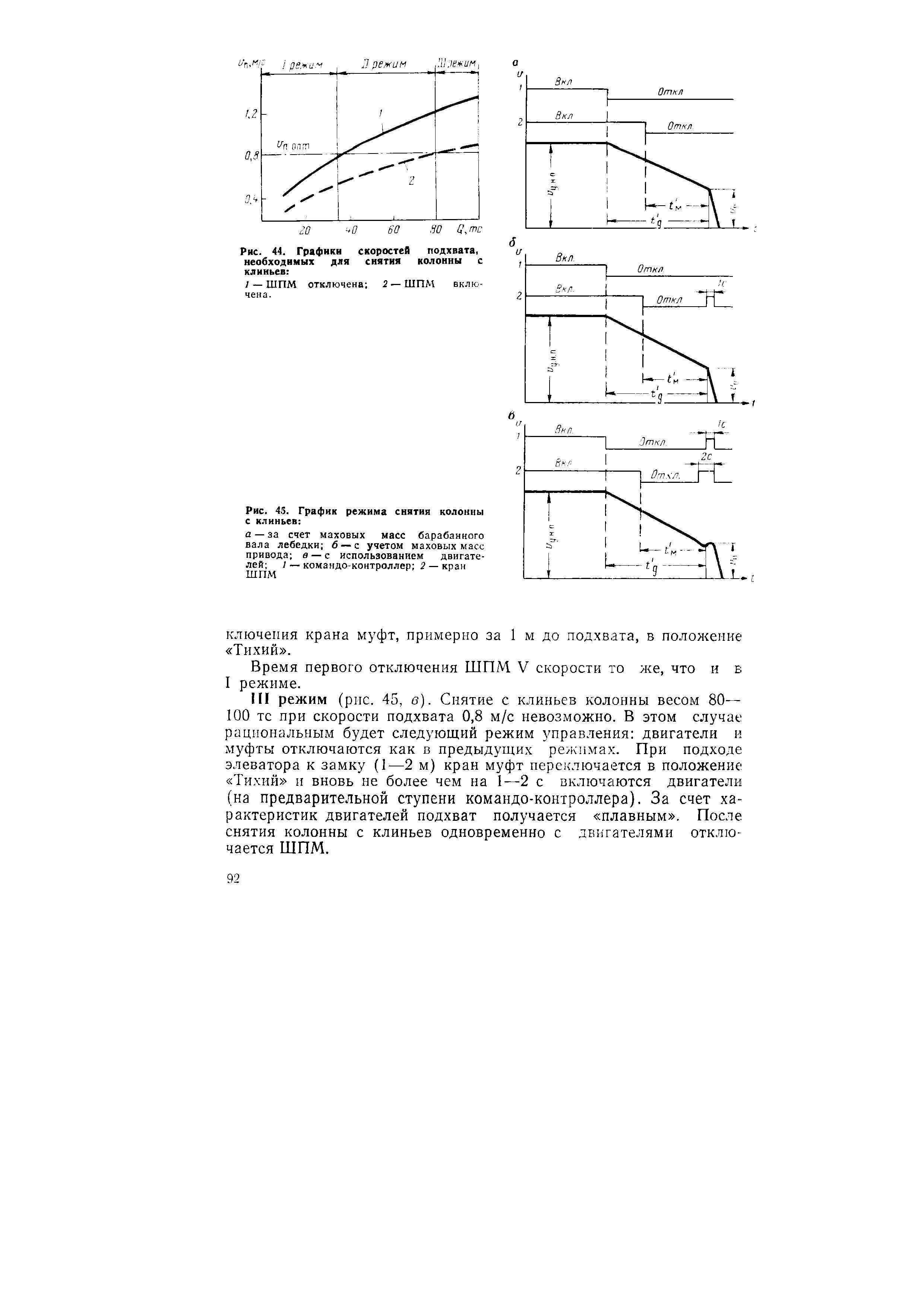 |
| Рис. 45. График режима снятия колонны с клиньев | 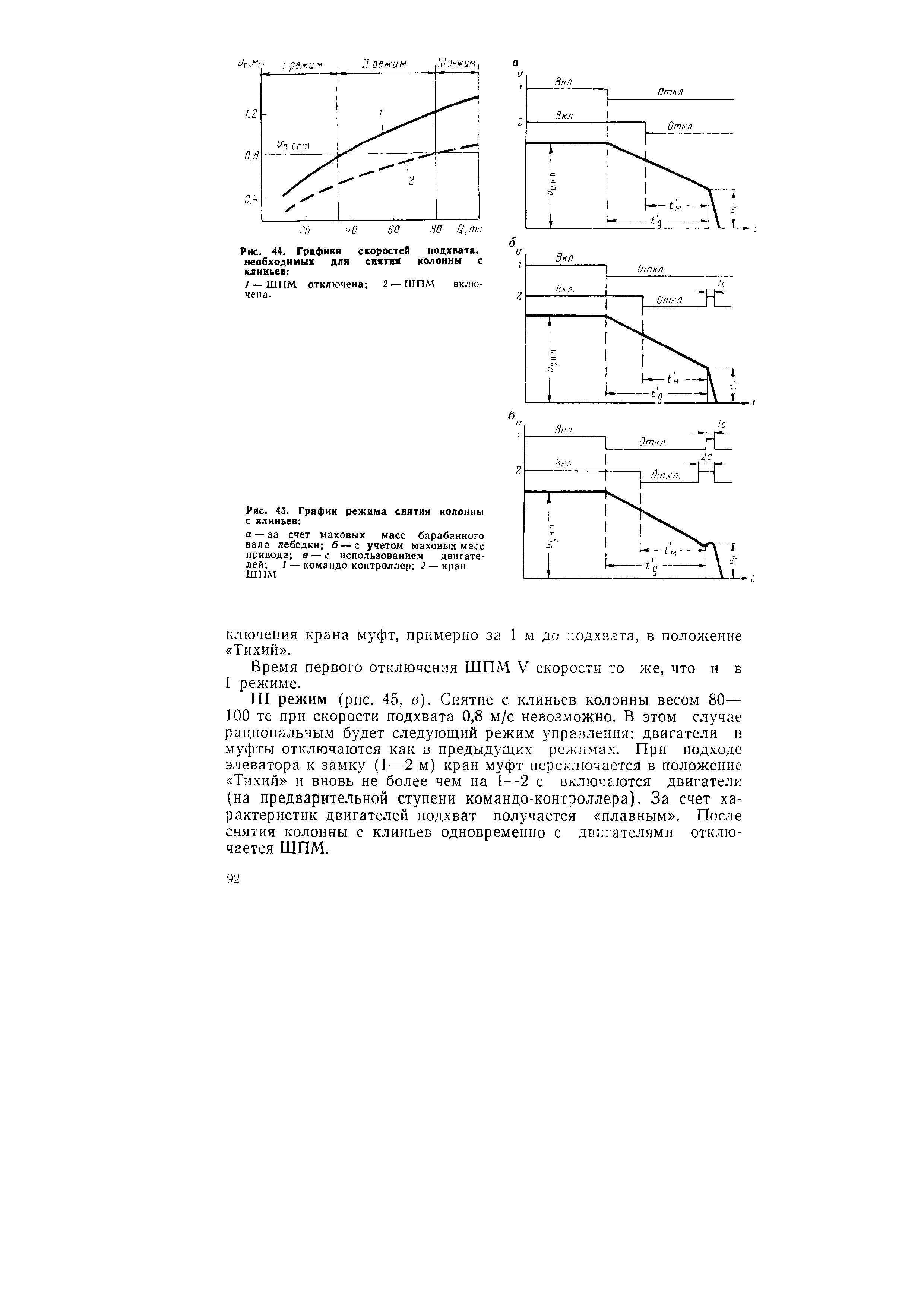 |
I режим. Снятие колонны с клиньев осуществляется за счет маховых масс барабана лебедки. Допустимый вес колонны, при котором реализуется этот режим определяют так же, как и в случае электропривода (см. рис. 44). Время отключения ШПМ V скорости определяется также из условия /H.G = M- [c.94]
II режим (соответствует II и III режимам на рис. 44). Снятие колонны с клиньев осуществляется за счет мощности дизелей, работающих на холостых оборотах. Время отключения муфты V то же, что и в I режиме. За 1—2 м до подхвата кран ШПМ переключается в положение Тихий . [c.94]
Предлагаемая методика расчета рационального режима взаимодействия органов управления при снятии колонны с клиньев предполагает проведение работы в три этапа. [c.94]
Смазочные материалы, затаренные в бочки, бидоны и другую мелкую тару, перевозят на специально оборудованных бортовых грузовых автомобилях. Бочки и другую мелкую тару, заполненную смазочными материалами, устанавливают в кузов автомобиля или прицепа в один ярус пробками вверх и закрепляют. Бочки, уложенные в накат, следует закреплять при помощи прокладок и клиньев. Бидоны и другую тару помещают в д евянные обрешетки. [c.135]
Антиклиналью (греч. анти — против, клино —наклоняю) называется подковообразная складка, обращенная выпуклостью вверх (см. рис. 10, а). Если выпуклой частью складка обращена вниз (рис. 10, б)—это синклиналь (греч. син — вместе, клино — наклоняю). Элементами складок являются свод — примыкающая к линии перегиба пластов центральная часть антиклинальной складки мульда (нем. мульде — корыто) — примыкающая к линии перегиба пластов центральная часть синклинальной складки . крылья — расходящиеся от перегиба сверху вниз, в противоположные стороны (антиклиналь), или сходящиеся навстречу друг другу внизу (синклиналь) боковые участки складки ядро — внутренняя часть складки, прилегающая к осевой плоскости. [c.53]
Инвентарный клин для расклинивания секций на опорах Изготавляется на месте согласно ТУ 36-2000-76 4 [c.25]
При спуске и подъеме свечи бурильщик многократно воздействует на следующие органы управления командо-контроллер двигателей лебедки (при дизельном приводе —штурвал топливных насосов) рычаг ленточного тормоза лебедки кран оперативных шиннопневматических муфт педаль управления клиньями. [c.13]
Рычаг тормоза Командо-контроллер Кран ШПМ Педаль клиньев [c.14]
Органы управления механизмами I группы включают в себя командо-контроллер (для электропривода) или штурвал топливных насосов (для дизельного привода), кран оперативной шинно-пневматической муфты (ШПМ), рычаг ленточного тормоза, педаль клиньев, встроенных в ротор. [c.17]
I участок — разгон с подхватом колонны характеризуется взаимодействием командо-контроллера, крана ШПМ и педали клиньев [c.27]
Управление подпроцессом характеризуется взаимодействием практически всех органов управления ленточного тормоза, коман-до-контроллера, крана ШПМ, педали клиньев. Для количественной оценки режима управления в качестве реперной точки принимается момент подхвата автоматическим элеватором колонны труб, хорошо различимый на тахограмме. [c.29]
Для сравнения расчетных и фактических значений этих параметров использовались осциллограммы процесса подъема бурильной колонны на обследованных скважинах, включающие в себя тахограмму движения барабанного вала лебедки сов.в, тахограмму привода шпр, графики положений клиньев, рукоятки ленточного тормоза, рукоятки командо-контроллера, рукоятки крана муфт. В процессе анализа осциллограмм остановки бурильной колонны косвенным путем по форме кривых скорости барабанного вала и привода определялись значения параметров режима работы муфты. [c.62]
II режим (рис. 45, б). Вес колонны 35—80 тс. Снятие колонны с клиньев только за счет маховых масс барабанного вала (т. е. с отключенной ШПМ) требует увеличения скорости подхвата до 1,2 м/с, что противоречит требованиям рациональной эксплуатации оборудования, так как приводит к увеличению динамических нагрузок в 2—2,5 раза (см. рис. 41). Работа при полностью включенной муфте могла бы обеспечить снятие колонны с клиньев с допустимой скоростью. Но это противоречит требованию рациональной эксплуатации самой ШПМ. Действительно, резкое нагруже-ние V скорости, грузоподъемность которой 34 т, колонной весом 70—80 тс недопустимо. [c.91]
III режим (рис. 45, в). Снятие с клиньев колонны весом 80— 100 тс при скорости подхвата 0,8 м/с невозможно. В этом случае рациональным будет следующий режим управления двигатели и муфты отключаются как в предыдущих режимах. При подходе элеватора к замку (1—2 м) кран муфт переключается в положение Тихий и вновь не более чем на 1—2 с включаются двигатели (на предварительной ступени командо-контроллера). За счет характеристик двигателей подхват получается плавным . После снятия колонны с клиньев одновременно с двигателями отключается ШПМ. [c.92]
Смотреть страницы где упоминается термин Клинья
: [c.133] [c.104] [c.134] [c.169] [c.14] [c.21] [c.25] [c.49] [c.53] [c.54] [c.63] [c.83] [c.83] [c.84] [c.84]Смотреть главы в:
Форекс Электронное руководство для успешной торговли на валютном рынке -> Клинья