Общий алгоритм движения к цели (или прочь от нее) можно представить следующим образом (см. рисунок). [c.215]
| Рисунок 34, Алгоритм движения к/от цели | 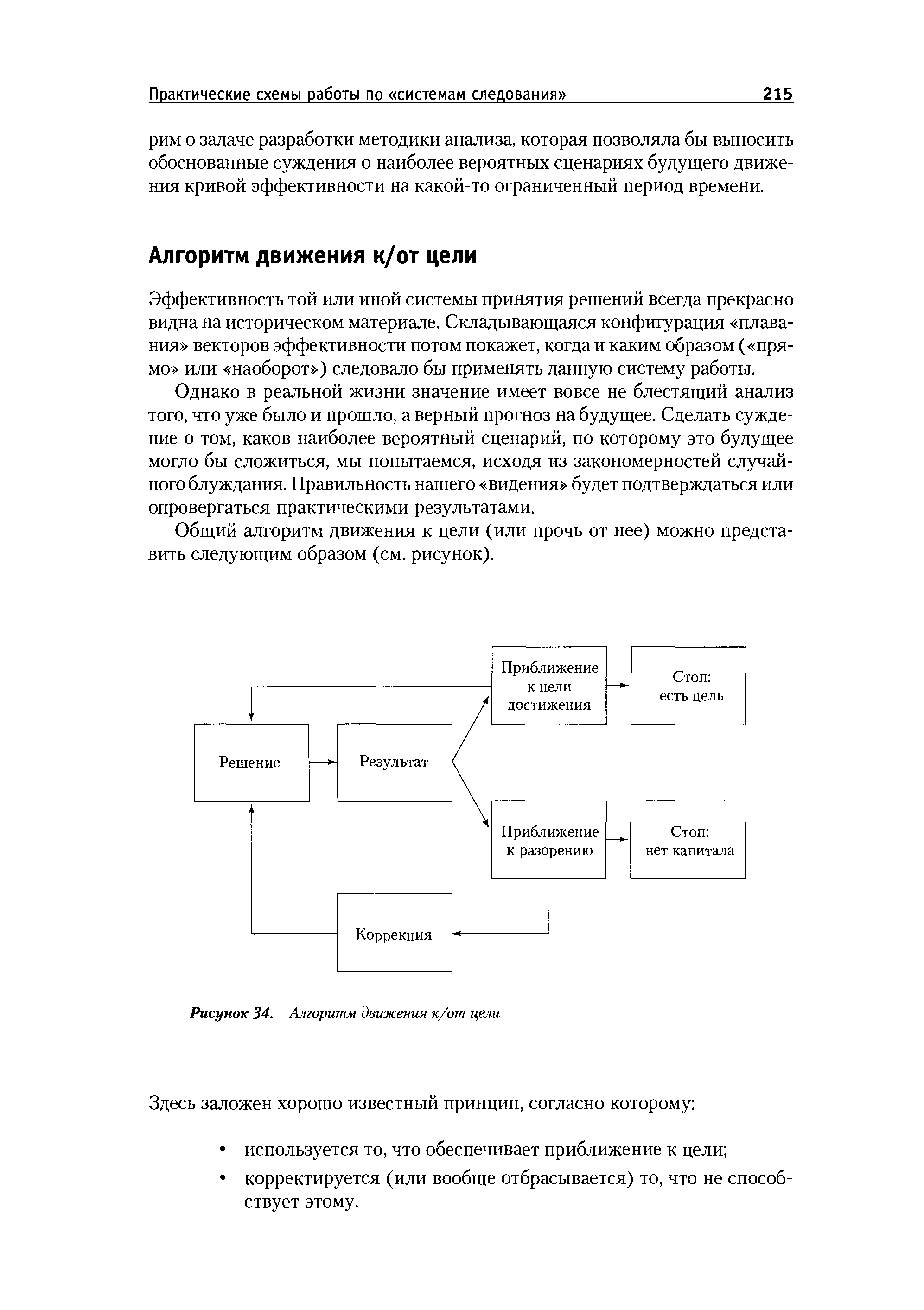 |
Наряду с прогнозированием важными элементами планирования развития производственной структуры являются ее моделирование и программирование. Моделирование имеет назначением определение различных состояний производственной структуры и ее частей в течение планового периода. Программирование включает разработку алгоритмов функционирования соответствующей производственной системы и ее структуры, определение конкретных путей движения к поставленной цели. Широкие возможности для анализа и проектирования производственных структур открывает использование методов организационного и экономического моделирования, позволяющих системно описывать и оптимизировать их функционирование и развитие. Анализ влияния изменений в факторах, воздействующих на производственную структуру, должен быть взаимосвязан со всеми другими сторонами функционирования данной производственной системы. Основу для этого составляет разработка модели функционирования производственной системы и анализ ее возможных состояний. Модель представляет собой логическое описание реального состояния и направлений (закономерностей) развития системы в конкретной фазе ее жизнедеятельности, а также предъявляемых к ней требований, включая конечные [c.57]
Характеристика трех видов учета на примере предприятий по поставкам продукции убеждает в том, что каждая из составляющих единого хозяйственного учета отличается целями, объектами, методами и техникой ведения учетного процесса. Поэтому вряд ли можно согласиться с предложениями осуществить полную интеграцию учета. Применение современных средств вычислительной техники действительно способствует известному сближению и взаимному проникновению бухгалтерского, оперативного и статистического учета. Например, переход к автоматизированной системе обработки учетных данных по движению продукции позволяет на основе принципа однократности ввода информации получить файлы данных для различных приложений. Однако дальнейшая обработка и формирование результатной учетной информации ведется по дифференцированным алгоритмам в зависимости от вида учета. Таким образом, различия в содержании показателей, способах и методах учета обусловливают самостоятельность и в то же время согласованность всех трех видов хозяйственного учета. [c.20]
Для распределения стоимости эл.энергии, израсходованной на технологические цели, для приведения в движение оборудования и механизмов (картофелечистки, овощерезки, мясорубки, хлеборезки, привода и др.) используют ранее распределенные суммы расходов на амортизацию механического оборудования. Это демонстрируется алгоритмом 8.2 и таблицей 70. [c.134]
Алгоритм расчетов показателей инвестиционной привлекательности будет включать расчет показателей прибылей и убытков, баланса, движения денежных средств, а также непосредственно показателей инвестиционного анализа. В определенной степени эти расчеты (первые три блока) аналогичны расчетам, производимым в рамках прогнозного анализа. Однако если прогнозные расчеты производятся для всей организации в целом и показывают перспективы развития всего бизнеса, то в этом случае прогнозируются приросты показателей, связанные с предполагаемыми инвестициями. Показатели рассчитываются на период экономической жизни проекта, определяемый инвестором. [c.450]
Для дальнейших расчетов необходимо определить кратчайшие расстояния от пункта(-ов) погрузки до пункта(-ов) разгрузки (четвертый блок, задача А), воспользовавшись базой данных третьего блока представленного алгоритма. В базе данных каждому варианту проезда между двумя вершинами транспортной сети соответствует расстояние /., скорость движения автомобиля vf и время проезда t = /,-/ ,-. Очевидно, что максимальную производительность подвижного состава обеспечит маршрут, соответствующий минимальному значению t Выбор критерия, по которому находят оптимальное решение, определяется целью, поставленной в задаче. Наиболее часто предусматривается минимизация пробега, который является наиболее простым критерием. Однако применение его, с нашей точки зрения, оправданно для междугородных и международных автомобильных перевозок, когда при примерно одинаковых условиях движения на всех участках маршрута план, оптимальный по пробегу, будет оптимальным и по времени, стоимости и себестоимости перевозок. Для внутригородских перевозок время остается основным критерием. [c.333]
Соответствующий алгоритм может использоваться инвестором в случае, когда он считает, что движение курсов фьючерсов произойдет, однако он не уверен, в какую сторону будет это движение. При формировании указанной стратегии используются одновременно два различных фьючерсных контракта. Цель формирования указанной стратегии состоит в извлечении прибыли за счёт использования дисбаланса (дифференциала) цен для двух фьючерсных контрактов. [c.96]
Так, при проектировании широкого класса сложных систем управления динамическими процессами и объектами (например, управление движением летательных аппаратов, технологическими процессами и т.д.) на заключительном этапе проводится полунатурное моделирование с целью корректировки алгоритмов обработки информации и управления, уточнения и корректировки их параметров с учетом динамических особенностей и характеристик элементов реальной аппаратуры, работающей в контуре управления, а также с целью получения оценок показателей качества проектируемых систем управления и исследования их эксплуатационных характеристик. [c.117]
Сложность автоматического управления движениями манипулятора в реальной среде, большой поток разнообразной информации, необходимой для выработки оптимальных управляющих воздействий на степени подвижности звеньев манипулятора, и т. п. требуют обработки большого объема данных в реальном масштабе времени и решения широкого круга логических и вычислительных задач, что посильно лишь системам, построенным на базе ЭВМ. Использование ЭВМ для целей управления движением в реальном масштабе времени в свою очередь порождает ряд серьезных проблем, касающихся разработки алгоритмов управления движением, матобеспечения и организации взаимодействия ЭВМ с подсистемами интегрального робота и человеком-оператором. На актуальность этих проблем и важность их решения для дальнейшего развития роботов указывает, в частности, академик Артоболевский [1]. [c.296]
Смотреть страницы где упоминается термин Алгоритм движения кот цели
: [c.387]Смотреть главы в:
Трейдинг Дополнительное измерение принятия решений -> Алгоритм движения кот цели