При использовании для плановых расчетов ЭВМ, повышающих возможности предприятий по проведению расчетов, рассчитывают и представляют в министерство несколько вариантов проекта плана (опорных планов), различающихся по количеству [c.75]
Для обеспечения приемлемой точности аппроксимации опорные планы Ajl должны быть линейно независимыми и число их должно быть не меньше размерности векторах. [c.20]
Опорные планы выпуска товарной продукции 20 [c.228]
Решение задачи начинается с нахождения опорного плана перевозок, который может быть определен с помощью так называемого метода северо-западного угла, метода минимального элемента и т. д. . . [c.71]
В рассматриваемом примере т + п — 1 = 6, число базисных клеток равно 5 < 6, а план является вырожденным. Чтобы перейти к невырожденному плану, можно изменить объемы добычи нефти в первом районе на е, приняв их равными 30 + е, а в третьей строке 15 — е (для сохранения баланса). Построенный с учетом этого метода северо-западного угла опорный план представлен в табл. 47. [c.73]
Очевидно, что построенные методом северо-западного угла опорные планы удовлетворяют условиям (72), (73), (74). [c.73]
| Таблица 47 Транспортная таблица с опорным планом | 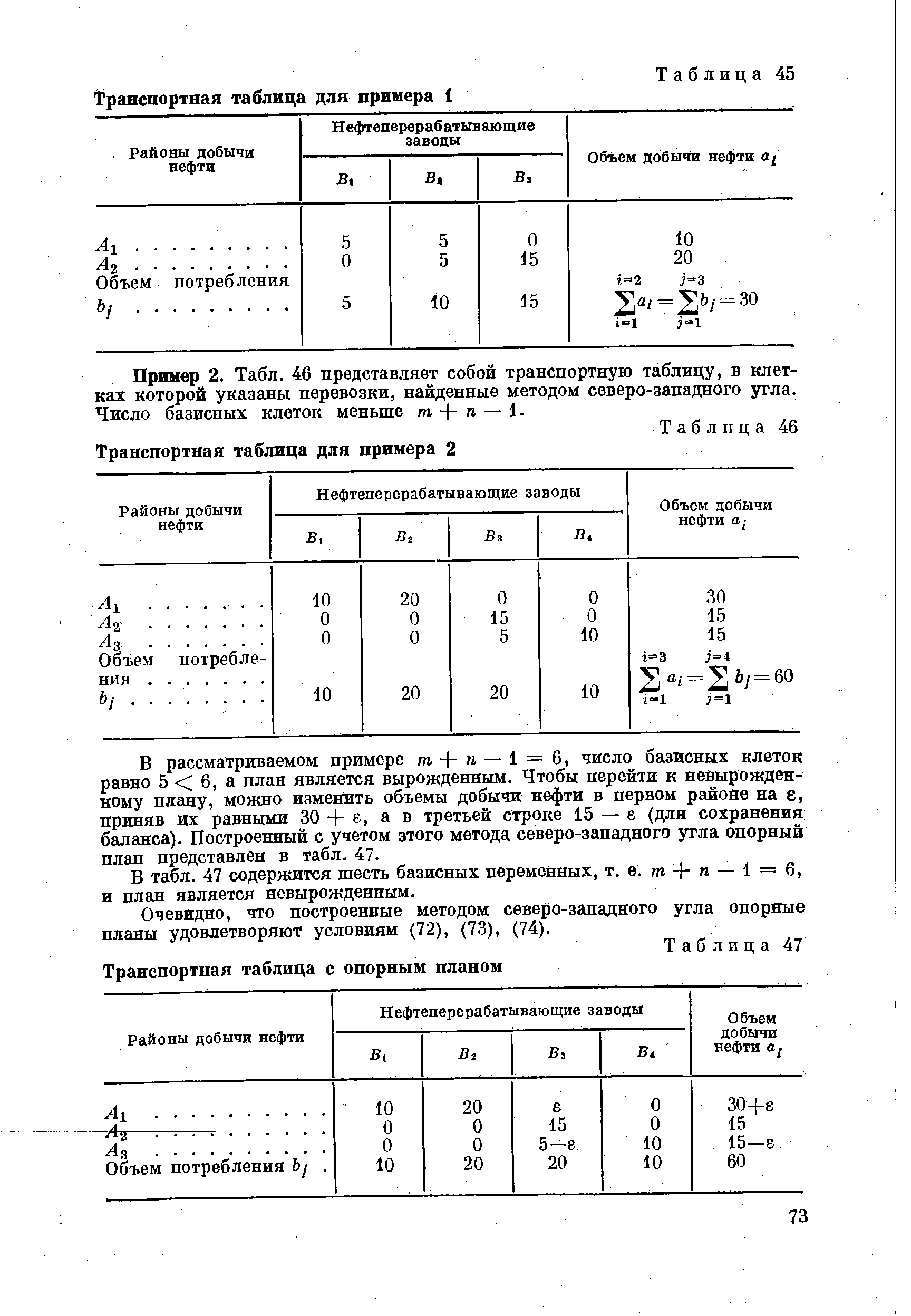 |
Оптимальное решение будет искаться по многошаговой процедуре. В качестве отправного плана можно. взять некоторый опорный план основной задачи, получающийся при отбрасывании условий (6). [c.62]
Указанные зависимости подставляются в билинейную форму F, находится точка минимума т№ Соответствующие этому значению переменные составляют промежуточный план, предшествующий k-й итерации. Для построения опорного плана й-й итерации необходимо зафиксировать переменные. уцг, приняв их равными значениям, полученным при вычислении промежуточного плана. При этом квадратичные члены формы F будут оставаться неизменными. Тогда нетрудно вычислить оптимальный план следующей линейной транспортной задачи [c.64]
Перейдем к изложению схемы решения г-задачи. Пусть известны векторы базиса некоторого опорного плана г-задачи. Обозначим через Л вектор относительных оценок условий г-задачи. [c.66]
Оптимальное значение линейной формы LA (х) используется для проверки оптимальности опорного плана z-задачи, породившего соответствующую х -задачу. Для проверки оптимальности опорного плана z-задачи достаточно решить. порожденную им х л -задачу и сравнить оптимальное значение LA (х) с оценкой К. Исследуемый опорный план z-задачи оптимален, если [c.67]
Разобьем матрицы А, X и С на подматрицы (клетки) в соответствии с принятым базисным решением - исходным (или опорным) планом. [c.74]
В общем виде любая транспортная задача может быть задана в виде таблицы (табл. 7.1), с помощью которой формируется опорный план, а затем осуществляются преобразования с использованием метода северо-западного угла. [c.225]
В нашей задаче число ненулевых перевозок в опорном плане равно [c.122]
В общем случае если имеется т поставщиков и п потребителей, то количество ненулевых перевозок в опорном плане будет [c.122]
Если, например, т = 10, а п = 20, то количество переменных будет 200, а количество ненулевых переменных в опорном плане - только 29. [c.123]
В теории линейного программирования доказывается, что оптимальный план обязательно является опорным. Иными словами, искать оптимальный план перевозок нужно только среди опорных планов. В этом и состоит основное значение опорного плана. [c.123]
Оптимальный план перевозок следует искать только среди множества опорных планов. [c.123]
Хотя в настоящем учебном пособии мы не ставили целью рассмотрение технических аспектов оптимизационных алгоритмов, все же, чтобы продемонстрировать роль введенного понятия опорного плана и дать представление об упоминавшихся выше специальных эффективных алгоритмах решения транспортных задач, представляет интерес получить решение нашей "игрушечной" транспортной задачи без помощи компьютера. [c.123]
Для начала необходимо просто написать какой-нибудь опорный план. Это легко сделать с помощью так называемого метода "северо-западного угла". [c.124]
В результате такой методики заполнения таблицы перевозок мы удовлетворили требования всех поставщиков и потребителей (т.е. все ограничения задачи). При этом видно, что из шести клеток таблицы перевозок мы заполнили четыре. Две клетки остались пустыми. Таким образом, мы получили опорный план. [c.124]
В теории линейного программирования разработаны простые методы, позволяющие автоматически находить циклы с отрицательной ценой. Мы не будем на них останавливаться. Заметим только, что описанная методика выделения циклов с отрицательной ценой и преобразования одного опорного плана в другой посредством циклических перестановок приводит к очень эффективным алгоритмам решения транспортных задач. [c.126]
Сбалансированность и специальная структура ограничений транспортной задачи обусловливают важное свойство оптимального плана перевозок его следует искать только среди множества опорных планов. Опорным называется такой план, в котором количество ненулевых перевозок равно сумме количеств поставщиков и потребителей минус единица. В связи с этим алгоритм решения транспортной задачи разбивается на две стадии [c.145]
Что называется опорным планом перевозок Чем он отличается от других допустимых планов [c.147]
Какие особенности транспортной задачи обусловливают возможность применения метода "северо-западного угла" для построения опорного плана [c.147]
Метод формирования опорного плана транспортной задачи. [c.294]
Допустимый план перевозок для транспортной задачи, в котором число ненулевых перевозок равно сумме числа поставщиков и потребителей минус 1. Оптимальный план перевозок нужно искать только среди множества опорных планов. [c.294]
Понятие М. используется в геометрической интерпретации задач линейного программирования множество допустимых решений задачи является выпуклым М., базисное решение или опорный план — одной из его вершин. (См. Вершина допустимого многогранника). [c.198]
Допустим, что имеется L предприятий, каждое из которых имеет R опорных планов выпуска. Производственные возможности 1-го предприятия в аппроксимационной модели описываются выпуклым многогранником, заданным следующей системой ограничений [c.20]
Существуют различные методы определения опорных способов производства. В качестве опорных способов в аппроксимационных моделях используются 1) базисные или оптимальные базисные решения, определенные в результате решения серии экстремальных задач с неагрегированными переменными, параметрами и способами производства 2) опорные планы, оцененные экспертным путем 3) статистически обоснованные и имевшие прецедент плановые решения. [c.25]
Каждому опорному плану z-задачи (можно привести в соответствие лгл-задачу, в которбй требуется вычислить минимум линейной формы [c.67]
Разумеется, опорных планов может быть много. В нашем примере нетрудно пересчитать, что существует 15 различных способов присвоить нули двум переменным из шести (т.е. имеется 15 опорных планов). В случае когда т = 10, п = 20, чиело различных опорных планов будет выражаться огромным числом 7,18 х 1034. Таким образом, о том, чтобы перебрать все возможные опорные планы и выбрать среди них оптимальный, в общем случае транспортной задачи, разумеется, не может быть и речи. Однако возможность осуществлять поиск только среди опорных планов все равно сильно упрощает задачу по сравнению с общей задачей линейного программирования. [c.123]
БАЗИСНОЕ РЕШЕНИЕ (опорный план) [basi solution] — термин линейного программирования, одно из допустимых решений, находящихся в вершинах области допустимых решений, либо (если линия уровня параллельна одному из отрезков границы области) Б.р. — весь этот отрезок (см. рис. Л.2 к ст. "Линейное программирование"). Оно является решением системы линейных ограничений, которое нельзя представить в виде линейной комбинации никаких других решений. [c.26]
Смотреть страницы где упоминается термин Опорный план
: [c.20] [c.66] [c.67] [c.52] [c.122] [c.145] [c.145] [c.294] [c.297] [c.196] [c.242] [c.242] [c.372]Смотреть главы в:
Методы оптимизации управления для менеджеров -> Опорный план