В одиннадцатой и следующих пятилетках предусмотрено ускорение темпов механизации ручного труда. На это направлены разрабатываемые долговременные программы механизации и автоматизации подъемно-транспортных, погрузочно-разгрузочных и складских работ. За 1981—1985 гг. выпуск различных средств механизации указанных работ намечено увеличить в 1,5 раза, а автоматических манипуляторов почти в 8 раз по сравнению с десятой пятилеткой. [c.211]
Тип манипулятора, работающего последовательно в соответствии с предусмотренными технологическими операциями, условиями и позицией на рабочем месте. Предусмотренная и заложенная информация фиксирована, неизменна [c.147]
С. Робот с изменяющейся Тип предыдущего манипулятора за последовательностью one- исключением возможности легкой раций замены вводимой информации [c.147]
Манипулятор, обладающий возможностью повторить любую операцию после инструктажа рабочего-оператора [c.147]
Манипулятор, выполняющий команды в соответствии с цифровой рабочей программой, заложенной в него и управляющей положением, последовательностью операций, реакций на внешние условия и т. д. [c.147]
Примечание. Манипулятор — механизм, обрабатывающий предмет без прикосновения к последнему рабочего-оператора. Обладает двумя степенями свободы. Робот — механическая система, обладающая подвижностью, подобной живому организму, иногда в сочетании с умственными способностями. Действует в ответ на человеческие команды. В этом контексте умственные функции означают способность выполнять по крайней мере одно из следующих действий делать вывод, управлять, приспосабливаться, учиться. [c.147]
РОБОТИЗАЦИЯ — одно из наиболее прогрессивных направлений в комплексной механизации производства, широкое применение автоматических манипуляторов (промышленных роботов), встроенных систем автоматического управления с использованием микропроцессоров и микро-ЭВМ, позволяющее создавать полностью автоматизированные участки производства, цехи, заводы. Промышленные роботы обладают важным преимуществом — в отличие от традиционных жестких средств автоматизации они обладают гибкостью и универсальностью, что позволяет широко применять их не только в массовом, но и в условиях мелкосерийного и серийного типов производства. По своим функциональным возможностям промышленные роботы можно разделить на три группы выполняющие вспомогательные операции (загрузочные, разгрузочные, транспортные, складские) выполняющие основные работы (сварочные, окрасочные, сборочные и др.) и, наконец, универсальные, способные выполнять комплекс основных и вспомогательных операций. При выборе участков производства, на которых должны применяться, в первую очередь, промышленные роботы, предпочтение следует отдавать литейному, кузнечно-штамповочному производствам, цехам и участкам гальванопокрытий, окраски, термообработки и др. участкам с вредными условиями труда. Здесь роботы не только сократят затраты ручного труда, но и позволят изолировать работающих от вредных условий труда, сохранить им здоровье. [c.311]
При определении экономии по заработной плате в связи с применением автоматических манипуляторов с программным управлением (промышленных роботов), использованием техники для районов Крайнего Севера, а также во всех случаях обеспечения реальной экономии при уменьшении потребности в рабочей силе дополнительно учитываются выплаты из фондов общественного потребления в размере 40% фонда заработной платы. [c.156]
Большие резервы повышения эффективности аппаратурных производств нефтеперерабатывающей и нефтехимической промышленности заложены в автоматизации технологических процессов на базе микропроцессорной техники, а в дискретных производствах — в роботизации и широком применении манипуляторов. [c.18]
В промышленности синтетического каучука планируются ввод в эксплуатацию высокомеханизированных и автоматизированных складских комплексов и реконструкция действующих, ввод установок охлаждения каучука перед упаковкой, внедрение пакетирования каучука с применением полиэтиленовой термоусадочной пленки, разработка и внедрение промышленных роботов и манипуляторов для укладки брикетов на поддоны, внедрение контейнерных перевозок и др. [c.123]
В некоторых подотраслях проводятся мероприятия по комплексной механизации и автоматизации на базе применения автоматических манипуляторов и промышленных роботов не только на отдельных операциях, но и на участках и в производствах. [c.125]
Всего в нефтеперерабатывающей и нефтехимической промышленности в 1984 г. эксплуатировалось 13 промышленных роботов и манипуляторов. Реализация запланированных мероприятий по внедрению робототехники даст значительный экономический эффект. Один робот при двухсменной работе позволяет, как правило, высвободить от 2 до 4 человек, повысить коэффициент сменности оборудования до 1,9, поднять производительность труда до 40%. Затраты на него окупаются за 1—3 года. При групповом использовании роботов эффективность их резко возрастает, только производительность труда увеличивается в 2—4 раза при гарантированном качестве продукции. Кроме того, создается возможность использования принципиально новых технологических процессов без непосредственного участия в них человека. В целом развитие робототехники знаменует собой качественно новое положение человека в системе труда. [c.126]
Комплексная механизация в первую очередь будет внедряться на тех видах строительных работ, где уровень ручного труда наибольший. В региональном разрезе это прежде всего относится к районам Крайнего Севера, Сибири и Дальнего Востока. Уменьшение и облегчение тяжелого ручного труда будет обеспечено внедрением автоматических манипуляторов с программным управлением, использованием средств малой механизации и электрифицированного инструмента. [c.155]
Особенно важное значение приобретает автоматизация строительных процессов путем широкого внедрения роботов и манипуляторов. Применение последних будет развиваться по пути создания параметрических рядов, основанных на типизации и унификации основных узлов и схем с применением микропроцессорной техники. Такой системный подход обеспечит проведение единой технической политики в роботизации и массовость внедрения. [c.156]
В электронной промышленности многие изделия (фотошаблоны, кристаллы, готовые полупроводниковые приборы, интегральные схемы и др.) очень хрупки, имеют низкую механическую прочность. В процессе многократных перемещений значительная их часть бракуется из-за механических повреждений. Возникает необходимость применения таких транспортных средств, которые могли бы свести к минимуму число перевалок деталей и изделий, не допускали бы потери ориентации изделий и различных их повреждений при перемещении. Весьма перспективным в этом смысле является применение роботов и манипуляторов, создание транспортных средств передачи движения с помощью магнитного поля или волновых процессов. В отрасли все чаще находят применение конвейеры на воздушной подушке. На таком конвейере сжатый воздух через специальные отверстия попадает на рабочую поверхность лотка, обрабатываемая деталь, например полупроводниковая пластина, оказывается на воздушной подушке. Горизонтальная составляющая силы давления воздуха перемещает пластину по лотку. [c.126]
Технической основой современного этапа автоматизации производства и электронной промышленности во все большей степени становятся промышленные роботы и манипуляторы, микропроцессоры, электронно-вычислительные машины. [c.137]
Промышленным роботом называется программируемый манипулятор, управляемый вычислительным устройством и действующий подобно человеческой руке. Промышленные роботы обладают широкими функциональными возможностями и весьма перспективны с точки зрения их применения с целью автоматизации производства. Роботы большей частью предназначены для манипулирования материалами, заготовками, деталями. [c.137]
Ремонт манипулятора мышь собственными силами 7 12 84 [c.187]
Принцип гибкости. Это один из самых главных принципов в современных условиях. Он подразумевает возможность выпуска новой продукции на гибко перестраиваемом с помощью управляющих программ оборудовании. Специализированное оборудование и оснастка могут быть в некоторых случаях более эффективными и дешевыми по сравнению с переналаживаемыми и гибкими средствами производства, но только в конкретных условиях — применительно к какому-либо одному изделию. Необходимость же обновления выпускаемых изделий влечет за собой, при использовании специального оборудования, перестройку всей производственной системы. Потери могут оказаться очень большими по сравнению с экономией, полученной при покупке или создании специального оборудования. Поэтому актуальным в 80-х годах стало создание гибких производственных систем (ГПС) и гибких автоматизированных линий (ГАЛ). Госстандартом СССР разработаны и утверждены ГОСТы, вводимые в действие с 1 января 1986 г. ГОСТ 25686 — 85 Манипуляторы, автооператоры и промышленные роботы и ГОСТ 26228 — 85 Системы производственные гибкие . ГОСТы содержат термины и определения, которые должны применяться при реализации этих наиболее прогрессивных видов оборудования. [c.105]
Решениями XXVI съезда КПСС намечено развитие производства автоматических манипуляторов, встроенных систем автоматического управления с использованием микропроцессоров и микро-ЭВМ, создание автоматизированных цехов и заводов. [c.72]
Гибкие сборочные роботы-манипуляторы — техника, изобретенная и созданная в Японии профессором Макино из университета Яманати, была поддержана сначала главным образом мелкими и средними компаниями, показавшими готовность инвестировать капитал в НИОКР для развития их производства. [c.148]
В цехе роботостроительной фирмы Токико", — продолжает В. Цветов, — я видел, как шеренга готовых к отгрузке роботов двигала руками"-манипуляторами в такт фирменному гимну, который выводили рабочие [61, с. 30]. Как видно, лозунг Робот — мой друг не случаен, он имеет в Японии глубокие психологические корни. [c.105]
Рабочие машины и оборудование предназначены для непосредственного воздействия на предметы труда литейное, кузнечно-прес-совсе, сварочное, металлорежущее, термическое и другое оборудование. Рабочие машины ч подразделяются на производственное оборудование, оборудование инструментального, ремонтного и других вспомогательных цехов и подъемно-транспортное (краны, конвейеры, роботы и манипуляторы и др.). [c.30]
Электротехническая промышленность способствует развитию народного хозяйства страны, ускорению научно-технического прогресса в одной из ведущих отраслей промышленности — машиностроении. Повышение качества и мощности электрооборудования оказывает огромное влияние на конструкции технологического оборудования, повышение их производительности. Конструкции многих современных станков, роботов и манипуляторов, прокатных станэв, автоматизированных производств могли быть созданы только на базе развития электропривода и электроавтоматики, составляющих одну из важнейших частей АСУТП. Развитие электротехники способствует не только повышению эффективности общественного производства, но и совершенствованию социалистических производственных отношений. [c.200]
Одной из главных форм автоматизации в отрасли является внедрение автоматизированных линий. Недостаток большинства имеющихся автоматических линий заключается в том, что они предназначаются, как правило, для обработки ограниченной номенклатуры конструктивно и технологически подобных деталей. Этот недостаток устраняется внедрением гибких производственных систем (ГПС), в результате мелкосерийное производство может быть организовано на прогрессивных принципах крупносерийного и даже массового производства. ГПС представляют комплекс высокопроизводительного технологического оборудования — станков с числовым программным управлением (ЧПУ), типа обрабатывающий центр , автоматических манипуляторов с числовым программным управлением, автоматизированных и роботизированных транс-портноскладских, накопительных, вспомогательных, контрольных и других систем с управлением от ЭВМ. Это дает возможность увеличить коэффициент использования оборудования до 0,85—0,9, снизить численность ППП в 6 раз, потребность в оборудовании — в 6—7 раз, потребность в производственных площадях — в 6—7 раз, резко уменьшить себестоимость выпускаемой продукции. В одиннадцатой пятилетке на 50 предприятиях отрасли созданы автоматизированные цехи, участки с применением ГПС и роботизированных комплексов. [c.205]
Мемекс Буша — большой письменный стол с архивом микрофильмов, приводимым в действие механическими манипуляторами, — наводит сегодня на ассоциации с Волшебником из страны Оз, показывающим свои фокусы с помощью огромных неуклюжих приспособлений, спрятанных за занавеской. Однако и его постановка проблемы — неадекватность современного способа обращения с информацией, и предложенное им решение — устройство, хранящее и организовывающее ее, были в своей основе, совершенно верны. Буш описывал в механистических терминах технологии 1945 года мультимедийный компьютер, подключенный к Сети. Он даже предсказал эквивалент поисковых Интернет-систем, устанавливающих цепочки полезных связей в огромной массе записей . [c.174]
В шинной промышленности стоит задача освоить автоматизированные комплексы на основе резиносмесителей большой единичной мощности в подготовительном рези-носмесительном производстве, червячные машины холодного питания при изготовлении протекторных заготовок, оснастить автоматические системы контроля устройствами для механизации отбора заготовок на основе промышленных роботов-манипуляторов, осуществлять сборку и вулканизацию покрышек на поточных автоматизированных линиях. [c.123]
На предприятиях резинообувной промышленности ведется большая работа по внедрению промышленных роботов и роботизированных технологических комплексов. Успешно сданы в опытную эксплуатацию роботы в производственном объединении Красный богатырь . В производственном объединении Красный треугольник разрабатываются манипуляторы-перезарядчики, манипуляторы съема сапог с колодки, манипуляторы обрезки голенища сапога, входящие в состав автоматизированной линии по изготовлению формовых резиновых сапог. В производственном объединении Сарканайс квадрате на операции отбора с каландра и укладки закройных голенищ проектируется внедрить робот Циклон-ЗБ . [c.125]
В Киевском производственном объединении Красный резинщик планируется на линии по изготовлению медицинских пробок использовать манипулятор-перезарядчик, а также внедрить манипулятор загрузки-выгрузки прессов. [c.125]
| Рис. 9.5. Схема гибкого технологического комплекса / — центр управления комплексом 2—склад инструмента 3 — манипуляторы для за-рядкн инструмента в магазины станков 4 — обрабатывающие центры 5 — накопители б — робот- шта-белер 7 — склад ы-готовок деталей — участок загрузки | 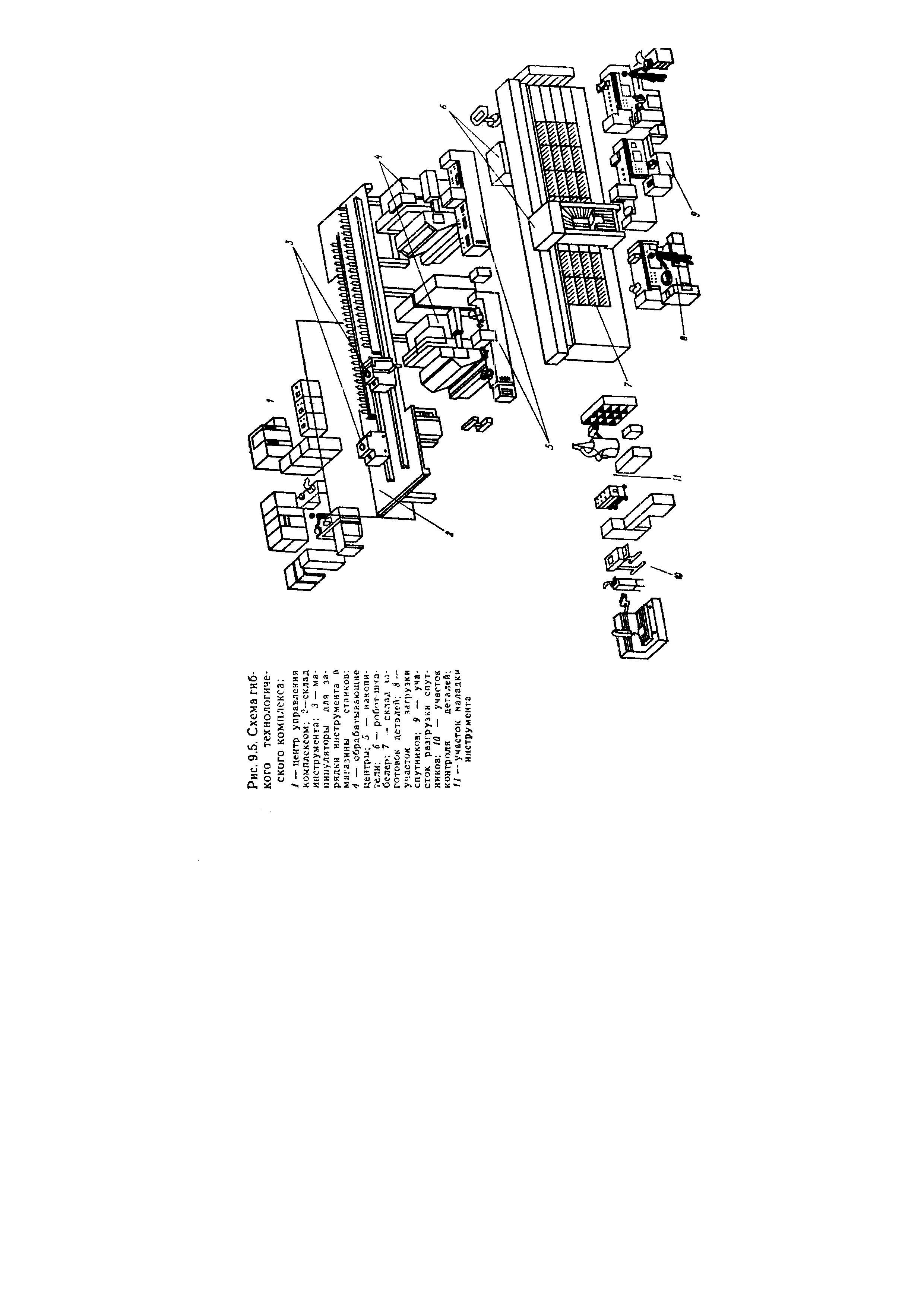 |
Изготовление средств транспорта, тары, оргтехоснастки и прочего вспомогательного оборудования в том числе роботов и манипуляторов [c.79]
В поточном производстве применяются самые разнообразные транспортные средства склизы, желоба, транспортеры (ленточные и подвесные), пневмотранспортные средства, промышленные роботы, универсальные манипуляторы с программным управлением и др. В электронной промышленности широко применяются конвейеры — транспортные средства, служащие для транспортировки изделия или транспортировки и выполнения на нем рабочих операций и регламентирующие ритм работы лоточной линии, т. е. играющие организующую роль в потоке. В том случае, если конвейер служит для перемещения изделий и поддержания ритма работы линии путем четкого адресования изделий по рабочим местам, он называется распределительным, если же он служит и местом выполнения операции, то называется рабочим. Конвейер мо- [c.125]
Промышленное изготовление наземной части объектов или укруп-, ненных блок-комплектов позволяет создать лучшие производственные условия для работающих защиту от различных погодных условий, отопление, освещение и другие социально-бытовые удобства, постоянство рабочего места. Все это при увеличении числа рабочих более высокой квалификации способствует развитию изобретательства и рационализации. Изготовление объектов в заводских условиях позволяет существенно улучшить условия труда и быта работников, уменьшить потери рабочего времени из-за простоев по погодно-климатическим условиям. Снижается доля ручного физического и малопривлекательного труда, поскольку промышленное производство гораздо легче поддается механизации и автоматизации, и в перспективе появляется возможность широкого применения роботов и манипуляторов. [c.140]